1.11. Критерий «тензорности». Примеры.
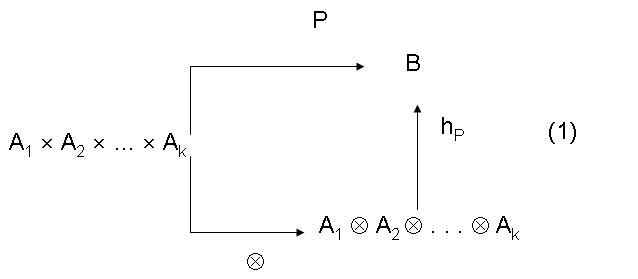
Одно из наиболее важных (по крайней мере с точки зрения алгебры) свойств тензорного произведения векторных пространств состоит в том, что с помощью этого произведения каждому полилинейному отображению канонически сопоставляется линейное. Действительно, рассмотрим диаграмму (1), где A1, A2, . . ., Ak – векторные пространства с одинаковым полем скаляров (а в остальном произвольные), P – некоторое полилинейное отображение множества A1 ´ A2 ´ . . . ´ Ak. В совокупности с каноническим отображением последнего в A1 Ä A2 Ä . . ., Ä Ak P определяет отображение из A1 Ä A2 Ä . . ., Ä Ak в B, которое автоматически расширяется до отображения hP всего пространства A1 Ä A2 Ä . . ., Ä Ak в B , поскольку A1 Ä A2 Ä . . ., Ä Ak на множество значений отображения Ä натянуто. Из полилинейности отображений Ä и P вытекает, что hP – линейное отображение. Очевидно, кроме того, что диаграмма (1) коммутативна, т.е. P можно заменить суперпозицией отображений Ä и hP.
Таким образом, для любой конечной системы A1, A2, . . ., Ak. В векторных пространств с одинаковым полем скаляров любое полилинейное отображение Р множества A1 ´ A2 ´ . . . ´ Ak в В порождает линейное отображение hP пространства A1 Ä A2 Ä . . ., Ä Ak в B, причем при заданных A1 ´ A2 ´ . . . ´ Ak. В отображение hP зависит только от Р, и P(x1, x2, . . . , xk) = hP(x1, x2, . . . , xk).
Перефразировка этого предложения может служить определением тензорного произведения A1 Ä A2 Ä . . ., Ä Ak , вполне эквивалентным сформулированному ранее. В частности, и из этого определения немедленно вытекает, что естественными моделятензоров являются полилинейные отображения — для каждого тензора найдется (и притом не одно) полилинейное отображение, с которым этот тензор можно отождествить. Другими словами, математический или экономический объект может быть тензором лишь при условии, что задание этого объекта равносильно заданию какого-либо полилинейного отображения. В конечномерном случае это необходимое условие является и достаточным, представляя собой тем самым вполне определенный и достаточно удобный критерий для распознавания тензоров среди изучаемых объектов.
Рассмотрим несколько простых примеров, иллюстрирующих использование этого критерия.
I. Один из основных постулатов классической механики сплошной среды состоит в том, что взаимодействие вещества в любом „подобъеме" (v) с остальной массой среды вполне характеризуется полем s некоторого вектора на поверхности области (v). Фиксировав какую-либо точку среды, рассмотрим в качестве (v) элементарный тетраэдр с центром в этой точке и гранями, три из которых взаимно перпендикулярны (так что единичные векторы а1, а2, а3 внешних нормалей к ним образуют ортонормированный базис). В этом случае из упомянутого постулата и условия равновесия (или сохранения импульса) вытекает s1n1 + s2n2 + s3n3 = sn, где s1, s2, s3, sn — векторы поля s („векторы напряжения") на гранях тетраэдра, n1, n2, n3 — составляющие орта n внешней нормали к грани с вектором напряжения sv. Если х — произвольный вектор с направлением внешней нормали к этой грани, то n = x/|x| и (a1 × x) s1 + (a2 × x) s2 + (a3 × x) s3 = |x| sn. Очевидно, что отображение по закону x ® (ai × x) si есть линейная векторная функция вектора х Î E3. Поэтому заданием векторов s1, s2, s3, т. е. заданием „напряженного состояния" в данной точке среды, определяется некоторый двухвалентный тензор Тs (тензор напряжения). С учетом „конструкции" закона этой функции Тs = aisi, откуда в свою очередь n × Ts = sn.
II. Пусть uijk ( i, j, k = 1, 2, ... , n) —система из п3 чисел, характеризующая при заданном базисе е1 е2, ... , еп пространства £п некоторый „объект". Отображение по закону (х, у, z) ® uijkxiyjzk, х = x = xiei, y = yjej, z = zkek, представляет собой трилинейную форму на En X Eп X En. Пусть, далее, е1, е2,..., еп — какой-либо другой базис для Eп и п3 чисел uijk — компоненты исследуемого объекта в этом базисе. Отображение по закону (х, у, z) -> ui’j’k’xi’yj’zk’, х = хi’еi’, у = уj’еj’, z = zk’'ek’, снова —трилинейная форма на En X Eп X En, однако не обязательно совпадающая с предыдущей. Любые две такие, порождаемые объектом рассматриваемого типа с заданием базисов для En, трилинейные формы на En X Eп X En совпадают тогда и только тогда, когда этот объект—(трехвалентный) тензор над En.
III. Рассмотрим какую-либо (в частности, не обязательно линейную) форму на En, т. е. функцию f: x ® f(x), x Î Eп со скалярными значениями. При фиксированном базисе для Eп функция f сводится к функции от п скалярных аргументов — компонент произвольного x Î Eп в данном базисе (или, если угодно, координат точки, радиус-вектором которой служит х). С учетом этого нетрудно проверить, что обычное определение дифференцируемости такой функции (по совокупности аргументов) в некоторой точке равносильно определению, по которому f дифференцируема при х ® х0, если для любого а Î Eп существует предел
lim {(f(xo + at) – f(xo))/t: t®0},
причем отображение по правилу
a ® lim {(f(xo + at) – f(xo))/t: t®0}, a Î Eп,
представляет собой линейную форму на Eп. Вследствие линейности этой форме соответствует вектор из Eп* = Eп, т. е. одновалентный тензор над Eп, с которым ее можно отождествить. Этот вектор, обозначаемый обычно через f’(хo) или Ñf(х0), называется (полной) производной или градиентом функции f при х = х0.
Учитывая, что по определению Ñf(х0) (Ñf(х0)) × a для каждого а Î En совпадает с указанным выше пределом, нетрудно установить связь с обычно определяемыми величинами. Так, для любого а с |а| = 1 скалярное произведение (Ñf(х0)) × a представляет собой то, что в классическом анализе принята называть „производной по направлению" (направлению вектора а). Соответственно при задании любого базиса е1, е2, ... , en Î En, так что х = хiеi и f сводится к функции на Rn или Сn, ¶f/¶xi = (Ñf(х)) × e, откуда df = (¶f/¶xi)dxi = (Ñf(х)) × dx, dx = (dxi) ei.
Приведенное определение производной скалярной функции на En пригодно и для функций на Ап (с той лишь оговоркой, что в этом случае Ñf(х) — вектор из An*), а также, и это главное, естественным образом обобщается на случай функций, значения которых суть тензоры любой валентности.